Every Robot Needs "Home" Position!
If you worked with industrial robots before or will work with them, you probably heard or will hear two magic words mostly which are "Home Position". This is some unwritten deal with human and machines to work in peace(don't fear from the robots if take them into the home position at the starting). "Did you send the robot at home position after initializing the system(alright depends on the scenario)?" or "PLC step waits the robot at home signal for starting" are the sentences which used by the people who work with robots. So it is important to understand the concept of home position and home signal for the agreement for the outer devices such as other robots and PLCs. For an example, I would like to mention about how to define home position and home position signal at the Epson robots. I used Epson RC+ 7.0 software for this. In this way, I had made a quick introduction to this robot brand.
What Is Home Position?
The Home Position could be explained briefly "park" or "idle" position for a robot. It is mainly used for absolute encoder robots that normally do not need to be mechanically homed. Defining home position and home position signal are such an important steps and concepts for industrial robot programming when creating robotic cell. Although there would be more than one home position and there isn't any unique rule for this definition. It strictly depends on(you should consider) the robot position into the cell, robot axes, robot tasks or other robots. Defining home position and home position signal can vary on the robots brands but you should hold the idea behind of it. I strongly recommend to use these two concepts for robots in your automation systems.
Homing - Epson RC+ 7.0
There are two ways to define Home Position for the Epson Robots. The first one is just using HomeSet command from command window and the second one is to use Home Config part from the control panel. For testing home position; you can click the [Robot Manager]–[Control Panel] tab and click the Home button or write Home command to the command window.

Fig: Home Command
In the first way, you need to determine a proper position for the robot to save as home position and take the current position of servos' encoder values(pulse values). From the Command window you can write these pulse values with the HomeSet command as you can see from the below figure.

Fig: Homing With HomeSet Command
HomeSet Function Example
This example uses the HomeSet function in a program:
Integer i
If
HomeSet(0) = 0 Then
Print "HomeSet is not defined"
Else
Print
"HomeSet values:"
For i = 1 To 4
Print "J", i, " = ", HomeSet(i)
Next
i
EndIf
Fend
In the second way, you need to determine a proper position for the robot to save as home position and take the current position of servos' encoder values(pulse values). From the Robot Manager window you can read the current pulse values and write these pulse values that you want and change them directly as you can see from the below figure.

Fig: Homing With Home Config Page
AtHome Signal
As I mentioned before, defining home position signal is such an important step to tell PLC " I am at home position". I am going to underline the way of home position definition with using system configurator. As you see from the figure, you can easily define the Athome signal.
Setup > System Configuration > Remote Control > Output > Athome > Specify The Output Number

Fig: Defining AtHome Signal
After defining and restart the controller you can check the signal at the specified output number.
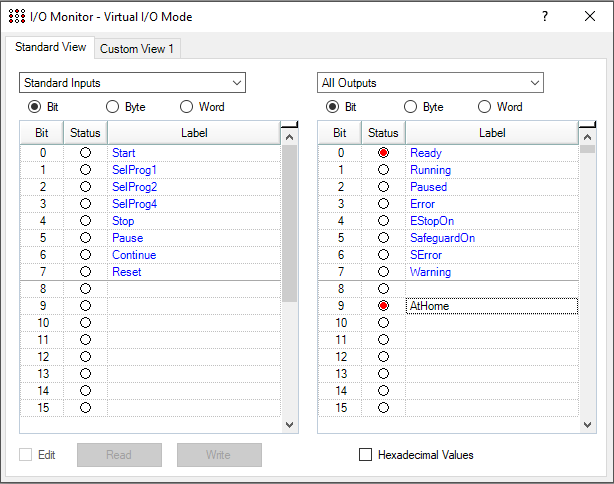
Fig: AtHome Signal Bit Turned On After Moving Home Position
It was the whole story about home position and and home position signal that I want to mention. Again, I would like to remind that don't forget to use home positioning and home position signal into your robotic cell.
Thanks For Reading...
Okan Okumuş
11.05.2021
Yes, home position very important.
ReplyDeleteThanks A lot for example
ReplyDelete